Connection Diagrams and Connector Pinouts
All Seed Robotics models come standard with USB interface and one main interface (the main connector), with a logical interface (by default this is RS485; users can also request One Wire TTL or Full Duplex TTL ).
Previously an Optional Bluetooth Module could also be installed on the unit and connects to any terminal that supports the Bluetooth SPP (Serial Port) Profile.
Below we detail the connector types for the units and connection diagrams with the most commonly used tools.
Supplying Power
External power must always be supplied through the main connector port (the one with the 3 pin or 4 pin connector on the back of the unit).
If you intend on using other interfaces for control such as USB or Bluetooth, power must still be applied through this connector on the VDD and GND pins.
Acceptable voltage range is typically 9V~24V. Please refer to the documentation of your specific model for the exact voltage range accepted.
Main Connector
The main connector is located at the back of the unit (it's a 3 or 4 in connector). It is the via through which you command and control your unit and is the most important connection for power and control.
(connecting via USB or other means is optional, and usually intended for Diagnostics and maintenance; regular operation and control is done via this Main Connector).
Please select the type of interface in your main connector (this should be shown in our Quotation; by defaut it is RS485)
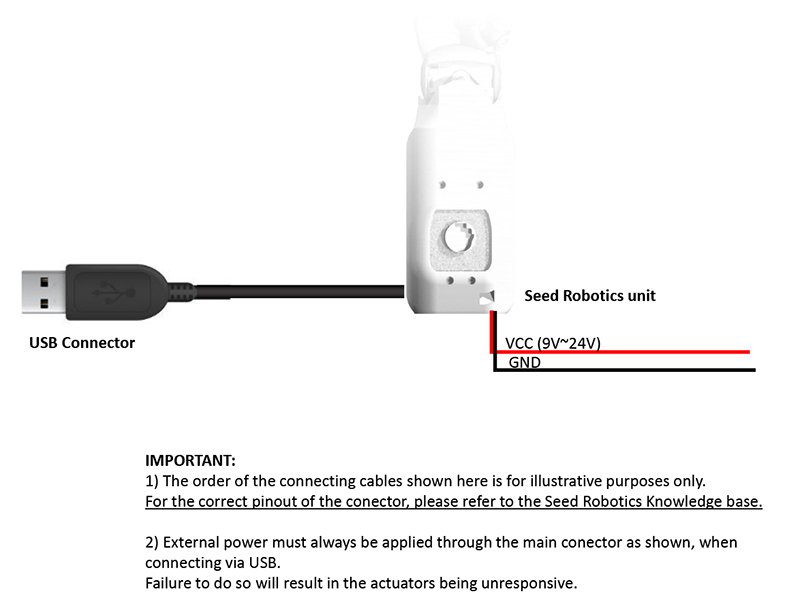
Connecting via USB
The USB connector is available on the side of the unit (a small cover may need to be removed to access it).
This connector is a standard micro-USB type connector. Once connected to the host, it will create a Virtual Serial Port.
When connecting via USB, you must still apply power through the Main Connector as shown in the diagram below. Failure to do so will result in the Actuators not responding and the hand not moving as they will not be powered.
As an alternative, you can apply External Power by simply connecting the normal Main Connector (i.e. if you have PC Interface Cable set from Seed Robotics (or something similar) to control your unit, simply connect it, and apply power as usual)
For more information, see the EROS: Setting up the USB Connection documentation.
Connecting via Bluetooth
The Bluetooth interface is an option that can be installed on your unit, at the time you place your order.
The Bluetooth interface uses the Bluetooth Serial Port Profile (SPP) to create a Virtual Serial port on the remote host.
IMPORTANT: you can connect via Bluetooth even if your unit is already connected via any of the other ways shown above. The unit can simultaneously accept commands through the main port and the Bluetooth interface.
This is especially convenient for online, wireless diagnostics and maintenance.
When connecting via Bluetooth, you must apply power through the Main Connector as shown in the diagram below.
Failure to do so will result in the Actuators not responding and the hand not moving as they will not be powered.

By default the firmware is configured to expose the Console over Bluetooth. This means that control using the Dynamixel protocol is not enabled by default on the Bluetooth port (although it can be enabled if required).
For more information, see Using the Bluetooth Interface Module.
Copyright © 2015-2023 Seed Robotics Ltd